|
Chapter 10 Outline: Angular |
||||||||||||||||||||||||
|
10.1: Angular Position, Velocity, and Acceleration: radian, average angular speed,
instantaneous angular speed, average angular acceleration, instantaneous
angular acceleration |
10.5: Calculation of Moments of Inertia: moment of inertia of a rigid object, parallel-axis theorem
10.6: Torque: moment arm 10.7: Relationship Between Torque and Angular Acceleration
|
|||||||||||||||||||||||
|
10.1: Angular Position, Velocity, and Acceleration |
||||||||||||||||||||||||
|
sin
(½dθ) = ½dx / r
|
As dθ approaches zero ½ds approaches ½dx which results in
If θ is in radians, sin(θ) = θ if less than 10° (10°π / 180°) |
|
||||||||||||||||||||||
|
vave
= Δx / Δt v = dx / dt ω = dθ / dt |
a = Δv / Δt α = Δω / Δt a = dv / dt α = dω / dt |
|||||||||||||||||||||||
|
Example If the Merry-Go-Round accelerates for 5 seconds at a rate of 0.1 rad/s2, what is the final angular velocity of the Unicorn. The Unicorn is at the outside edge 6 meters from the center? At this time what is the angular velocity of the Satyr on the inside edge which is 3 meters from the center? |
α = Δω / Δt 0.1 = Δω / 5 Δω = ½ rad / sec (initial is zero…so the change is equal to the final)
Same answer for both…angular velocity doesn’t depend on radius. |
|||||||||||||||||||||||
|
|
||||||||||||||||||||||||
|
10.2: Rotational Kinematics |
||||||||||||||||||||||||
|
d = ½at2 + v0t + d0 θ = ½αt2 + ω0t + θ0 |
||||||||||||||||||||||||
|
Example If the angular position is described by the following equation, θ = 6t2 - 5t - 20, what is the angular acceleration at 4 seconds?
|
ω = dθ / dt α = dω / dt α = d2θ / dt2
α = d2(6t2 - 5t – 20) / dt2 α = 12 radians/s2
|
|||||||||||||||||||||||
|
Example If a frictionless pulley has an inertia of 1 kgm2 (which can be modeled as a solid disk), where m1 = 8 kg, m2 = 12 kg, and R = 40 cm; what is the acceleration of the system? |
|
τ = I α FNet r = I α [m2(g-a) – m1(g+a)] r = I (a / r) a = (m2 - m1)g / (I/r2 + m2 + m1) a = 1.53 m/s2 |
Key Point This is a frictionless pulley, but NOT massless, so the tension on each side is NOT equal. |
|||||||||||||||||||||
|
|
||||||||||||||||||||||||
|
10.3: Angular and Linear Quantities |
||||||||||||||||||||||||
|
v
= dx / dt dx = r dθ v = r (dθ) / dt ω = dθ / dt dθ = ω dt v = r (ω dt) / dt v = ω r |
at = dv / dt at
= r dω/dt at = α r
at à tangential |
ac
= v2 / r ac = ω2r
ac à centripetal |
a2 = at2 + ac2 a2 = (αr)2 + (ω²r)2
a = r √(α2 + ω4)
|
|||||||||||||||||||||
|
Example If the Merry-Go-Round accelerates for 5 seconds at a rate of 0.1 rad/s2, what is the final (tangential) velocity of the Unicorn. The Unicorn is at the outside edge 6 meters from the center? At this time, what is the (tangential) velocity of the Satyr on the inside edge which is 3 meters from the center? |
α = Δω / Δt 0.1 = Δω / 5 Δω = ½ rad / sec |
v = ω r v = ½ rad/sec (6 meters) v = 3.0 m/s
v = ω r v = ½ rad/sec (3 meters) v = 1.5 m/s
|
||||||||||||||||||||||
|
Demo: Rotational Inertia: ME-Q-RI
|
||||||||||||||||||||||||
|
10.4: Rotational Kinetic Energy |
||||||||||||||||||||||||
|
Ki
= ½ mivi² |
All objects can be broken up into smaller components, thus rotational kinetic energy is the sum of the kinetic energies of all these smaller components, or |
KR
= ½Σ mivi² |
where v = ωr so At this point we define a new term, Inertia. I = ½Σ miri² |
|||||||||||||||||||||
|
K = Kt + Kr t à translational r à rotational K = ½mv² + ½Iω² |
||||||||||||||||||||||||
|
Demo: Rotational Inertia Rods: ME-Q-RR
|
||||||||||||||||||||||||
|
10.5: Calculation of Moments of Inertia |
||||||||||||||||||||||||
|
Parallel Axis Theorem
The moment of inertia about any axis parallel to and a distance D away from this axis is I = ICM + MD2
|
|
|
||||||||||||||||||||||
|
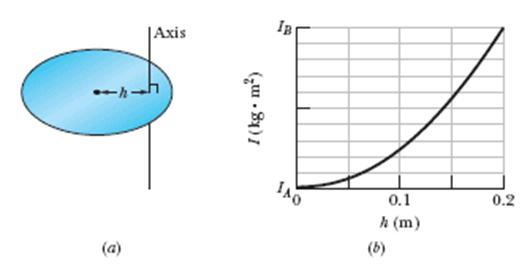
Figure (a) shows a disk that can rotate about an axis at a radial distance h from the center of the disk. Figure (b) gives the rotational inertia I of the disk about the axis as a function of that distance h, from the center out to the edge of the disk. The scale on the I axis is set by IA = 0.150 kg·m2 and IB = 0.450 kg·m2. What is the mass of the disk?
|
||||||||||||||||||||||||
|
Calculate I at h = 0.1 m (or 0.2 m)
(IB - IA = .3) Ih=0.1 = 0.15 + 2.5div (0.3kgm2 / 10div) Ih=0.1 = 0.225 kgm2
|
Then apply Parallel Axis Theorem with the following given
|
|||||||||||||||||||||||
|
Then write two Parallel Axis Theorem Equations. |
ICM = Ih=0 = 0.15 kgm2
|
ICM + md2 0.15 + md2 |
||||||||||||||||||||||
|
h = 0.1 ½ mr2 + m h2 ½ mr2 + m 0.12 0.15 + 0.225
½ mr2 + m 0.12 = 0.375 |
h = 0.2 ½ mr2 + m h2 ½ mr2 + m 0.22 0.15 + 0.45
½ mr2 + m 0.22 = 0.6 |
Two Unknowns…two equations. To solve…subtract the two equations
½ mr2 + m 0.22 = 0.6 ½ mr2 + m 0.12 = 0.375 0 + m (0.03) = 0.225 solve for m m = 7.5 kg
|
||||||||||||||||||||||
|
Another example this time using the basic definition à r2dm
Example What's the moment of inertia through the central axis of a symmetrical homogenous cylinder? |
I
= ∫ r2dm I = ½ MR2 |
I = (as Δmi approaches 0) I = Σ ri2Δmi I = ∫r2dm
dm = ρ dV ρ = m / V
& by substituting ρ = M/V where V = πR2L back into the equation we get |
||||||||||||||||||||||
|
What
role do center of mass of an object and inertia play?
|
||||||||||||||||||||||||
|
The one to the right is obvious, CM = L/2 (the middle of the meter stick), thus, h is zero to L/2 PEmax or Ug = mg(L/2) and KR = ½Iω²
How do we calculate Inertia (r2dm)? Linear density is λ = m / L (but L is the radius, so λ = m / r) |
|
|||||||||||||||||||||||
|
I = r2 dm dm = λ dr I
= r2 λ dr |
Ug = mg(L/2) KR = ½Iω2
mg(L/2) = ½Iω2 mg(L/2) = ½(m L2/3)ω2 ω = √(3g/L)
|
And if we want the linear speed at the bottom or the pendulum v = ωr (r = L) v = ωL v = L √(3g/L) v = √(3gL2/L) v = √(3gL) |
||||||||||||||||||||||
|
Once
again CM is very simple (it's the center of the ball since the rod is
massless), and the Inertia doesn't even have to be calculated mgL
= ½(m L2)ω2 |
|
|||||||||||||||||||||||
|
This time we simply add together the Inertia of each portion of the rod-ball pendulum.
|
|
|||||||||||||||||||||||
|
I
= Irod + Iball
|
Ug = mg(L) and KR = ½Iω2 mgL = ½ I ω2
mgL = ½(4m L2/3)ω2 |
|||||||||||||||||||||||
|
As you can see the center of mass, thus the inertia, for all of three of these changes. |
||||||||||||||||||||||||
|
Table 10.2
|
|
|||||||||||||||||||||||
|
|
||||||||||||||||||||||||
|
|
|
|||||||||||||||||||||||
|
10.6: Torque |
||||||||||||||||||||||||
|
Force
times the lever arm (distance) is Torque, t d is the perpendicular distance from the pivot point to the force vector t = Fd where d = sinφ r t = r F sinφ
t = F^d, which is a little easier for beginning students to understand. t = F^ d t = sin60°(100N) (0.1m) t = 8.66 Nm
Proper METHOD t = F d^ t = 100 N sin60°(0.1 m) t = 8.66 Nm
Doesn’t look too different…right?
|
|
|||||||||||||||||||||||
|
|
||||||||||||||||||||||||
|
|
||||||||||||||||||||||||
|
|
||||||||||||||||||||||||
|
10.7: Relationship Between Torque and Angular Acceleration |
||||||||||||||||||||||||
|
F = m a t = I a |
|
|||||||||||||||||||||||
|
What is the angular acceleration of a 100 gram meter stick (a hole is drilled at the 0 cm and the stick pivots about the 0 cm position) if a force of 0.2 Newtons is applied to the 100 cm end of the stick? |
inertia of a solid rod is 1/3 mr2 t = I a F d = m r2/3 a 0.2N*1m = 0.1kg(1)2/3 a a = 6 rad/s2 |
|||||||||||||||||||||||
|
10.8: Work, Power, and Energy in Rotational Motion Rolling Motion of a Rigid Object |
||||||||||||||||||||||||
|
dW = F ds dW
= F sinφ r dθ (just like the clock in our room where second hand requires work to be done all the time to keep it moving) |
|
|||||||||||||||||||||||
|
dW = t dθ dW/dt = t dθ/dt P = dW / dt Power
= t dω dω = dθ/dt |
Σ t = I α Σ
t = I dω / dt Σ W = ½I ωf² - ½I ωi² |
|||||||||||||||||||||||
|
|
||||||||||||||||||||||||
|
10.9: Rolling Motion of a Rigid Object |
||||||||||||||||||||||||
|
vCM = ds / dt vCM = R dθ / dt vCM = R ω |
aCM = dvCM / dt aCM = R dω / dt aCM = R α |
Parallel Axis Theorem
|
||||||||||||||||||||||
|
Applying the parallel axis theorem
|
||||||||||||||||||||||||
|
the
Total Kinetic Energy (K = ½Ipω²) can now be expressed as |
||||||||||||||||||||||||
|
Demo: Double Cone and Plane: ME-J-DC Actually belongs in Ch 9…but the center of mass is actually lowering…but it looks like the cone is going up…so could also be included in conservation of energy…so a good review for Total Kinetic Energy. |
||||||||||||||||||||||||