|
Chapter 12 Static Equilibrium and Elasticity |
|||||||||
|
12.1: The Conditions for Equilibrium: rotational l equilibrium,
static equilibrium
|
12.3: Rigid Objects in Static Equilibrium
12.4: Elastic Properties of Solids: Young's Modulus, Shear Modulus, and Bulk Modulus |
||||||||
|
12.1: The Conditions for Equilibrium |
|||||||||
|
For a particle to be in equilibrium, the net force must be equal to zero
1st: ΣF = 0 in all dimensions
|
A second condition for objects must be met. 2nd: Σt = 0 t = r x F or F · d
|
||||||||
|
ΣFx = 0 N |
ΣFy = 0 N |
ΣFz = 0 N (3-D) |
ΣtCW = 0 Nm |
ΣtCCW = 0 Nm |
|||||
|
Note: In solving most of the equilibrium problems we still must use the fact that the net forces must sum to zero
For an object with a length, L, this is not so simple. |
Note: an object can be rotating and be in equilibrium, just not accelerating
|
||||||||
|
Summarize 1. The resultant external forces must be zero. That is the forces that cause counterclockwise rotation (positive torque, +t) must be offset by the forces causing the clockwise rotation (negative torque, -t) |
|||||||||
|
Demo: Balancing Coke can: ME-J-BC |
|||||||||
|
12.2: Rigid Objects in Static Equilibrium |
|||||||||
|
The center of gravity…is in the identical position as center of mass, except where artificial gravity is generated, or satellites in orbit, rotating space station, cars going around turns, etc. If the acceleration is consistent throughout the object then these are the same.
|
|||||||||
|
xcm = (m1x1 + m2x2 + m3x3 + …) / mtotal xcg = (m1g x1 + m2g x2 + m3 gx3 + …) / mtotalg (the g’s cancel out) xcg = (m1x1 + m2x2 + m3x3 + …) / mtotal
|
|
||||||||
|
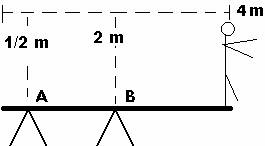
Some examples Stick man (mass 50 kg) is standing at the end of a diving board of mass 10 kg. What is the force exerted on point A and B? |
Since in static equilibrium we can choose a pivot point at any point. Logically we would choose a pivot point at A or B, but if we do one of these will cancel out of our torque equations…but this is OK. I will choose point B. |
|
|||||||
|
τcw = Fstick rstick τcw = 50 “g” (4 – 2) τcw = 1000 Nm
|
τccw = FA rA τccw = FA (2 - ½) τccw = 1.5FA Nm |
Summation of forces, both in the vertical and horizontal direction MUST sum to zero in static equilibrium. ΣFy = 0 or ΣFup = ΣFdown FB = FA + Fstick FB = 667 + 500 FB = 1167 N à pushing up
|
|||||||
|
1000 Nm = 1.5FA Nm FA = 667 N à pulling down
We must have a counter clock wise torque, this means that the support at point A must be pulling downwards, since the board is pulling upwards. |
|||||||||
|
|
|
|
|||||||
|
Demo: Torque and levers: ME-J-TL
|
|||||||||
|
12.3: More on the Center of Gravity |
|||||||||
|
As an arm bends, the elbow is the pivot point.
In the example to the right, the muscle attaches the bone, just below the elbow (shown as 2 cm from the elbow) . A 5 kg mass is being supported by the arm as shown.
The muscle provides a counter-clockwise torque where the 5 kg mass is creating a clockwise torque. The question is, how much force is exerted by the muscle to maintain the position of the 5 kg mass? |
As you see most of our problems in this basics mechanics course, we can assume that the center of gravity is also the center of mass, as demonstrated by this problem. |
||||||||
|
τcw = m5kg g(0.3m) |
τccw = Fmuscle(0.02m) |
If in static equilibrium, then τcw = τccw mg(0.3m) = Fmuscle(0.02m) 50(0.3m) = Fmuscle(0.02m) Fmuscle = 750 N |
|||||||
|
Now if you notice, this problem belongs in the above section, but what if we also include the mass of the forearm? Redo problem with mass of forearm as 2 kg, if you notice we must assume all of the mass is located at the center of mass. |
|||||||||
|
τcw = m5kg g(0.3m) + m2kg g(0.15m) τcw = 50N (0.3m) + 20N (0.15m) τccw = Fmuscle(0.02m) |
m5kg g(0.3m) + m2kg g(0.15m) = Fmuscle(0.02m) 50N (0.3m) + 20N (0.15m) = Fmuscle(0.02m) Fmuscle = 900 N |
||||||||
|
|
|||||||||
|
|
|||||||||
|
12.4: Elastic Properties of Solids |
|||||||||
|
In class we calculated the Young’s Modulus for the white nylon rope.
There are three types of elastic deformation, where elastic deformation is defined as Elastic Modulus = stress / strain
Young’s Modulus: elasticity in length Y = stress / strain Y = F / A / ΔL / L
|
In class our rope was about 10 meters. The diameter was 1 cm. The total stretch was about 5 cm with a 100 N applied force. We calculated Young’s Modulus for the rope.
Y = F / A / ΔL / L Y = 100 / πr2 / 0.05 / 10 Y = 100/π0.0052 / 0.05 / 10 Y = 2.5 x 107 N/m2
As a point of reference, Ysteel = 2 x 1011 N/m2 |
||||||||
|
Shear Modulus: Elasticity of shape (area) S = stress / strain S = F / A / Δx / h
|
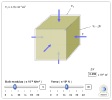
Bulk Modulus: Volume Elasticity B = stress / strain B = ΔF / A / ΔV / V
|
||||||||
|
|
|
||||||||
|
|
|
||||||||
|
Demo: Youngs, Sheer, Bulk Modulus: ME-R-MY
|
|||||||||